
17.01.2019
Gleich zu Beginn des neuen Jahres hat es mich in die Türkei gezogen.
Dort habe ich die Inbetriebnahme von zwei FANUC P-250iB Robotern begleitet.
Diese lackieren bzw. patinieren dort unter anderem Kunstgussprodukte.
Mit selbst konstruierten, 3D-gedruckten Adaptern habe ich einen Kundenversuch mit iRVision und Forcesensor durchgeführt. Dieser hat bewiesen, dass der Roboter die Getriebeteile mit der Kamera finden und mit dem Kraft-Momenten-Sensor feinfühlig in die Spannvorrichtung einführen kann.



Sehr gerne war ich auf der FANUC Open House in Neuhausen und hab mich dort über Neuerungen informiert und ausgetauscht – Vielen Dank!
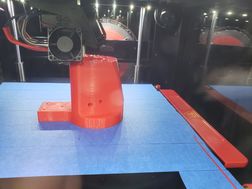
Das erste Mal habe ich nun auch meinen 3D Scanner eingesetzt. Dabei entstand eine Wandhalterung für eine Fernbedienung: Das erste KILIVATIONS-Produkt?




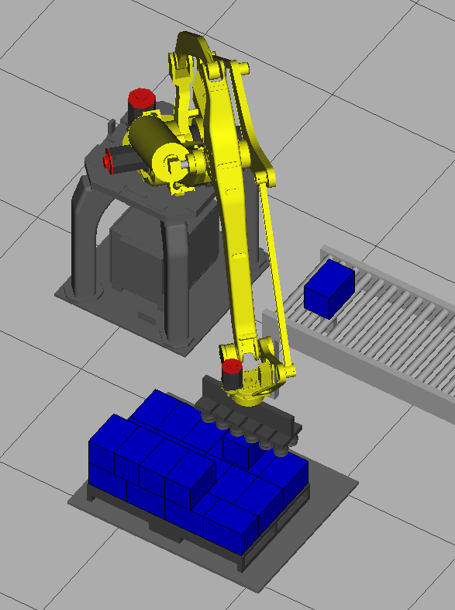
Ich habe an einem Konzept gearbeitet, welches ich Inlinepalletizing getauft habe. Dabei geht es um die Möglichkeit zum parametrischen Palettieren von z.B. Kartons bzw. Paketen.
Es werden dazu lediglich wenige Angaben, wie z.B. die Abmaße und das Gewicht des Kartons über eine einfache Maske eingegeben. Daraus berechnet der Roboter seine Fahrwege und Positionen.
Weitere Dienstleistungen waren z.B. ein Lackierprogramm für einen Motorenabdeckung oder eine Simulation, die die Position und Taktzeit für Roboter einer Schweißzelle ermittelt.
